
In this post we are going to look at two methods for approximating a solution to some ordinary differential equation. We will only consider the first order separable initial value problems. Here, the ‘first order’ means that the problem contains a first derivative only. The word ‘separable’ implies that the derivative can be separated from the derivative function (i.e. we can separate the derivative terms from the terms that do not involve derivatives). Finally, an initial value problem is a problem for which an initial condition is given, thus we have two starting values for x and y.
The following are examples of the types of problems we are considering:

The above examples contain expressions for the derivative of y(x). Thus, we are given the derivative, which is some function f() of x and y, and we are also given the initial value. This initial value is the value of x for which y(x) is already known. Please note that we do not know the exact expression for y(x), we just have the expression for the derivative of y w.r.t. x.
Solving a differential equation means finding the y(x). Numerical solutions to differential equations usually approximate the y(x) at some required point. So, a numerical solution does not produce an expression for y(x), it just approximates the value of y(x) at some point x. Given enough approximations, we should also be able to graph y(x) on some interval.
There are many types of approximations to differential equations. Here we will look at Euler’s and Runge-Kutta methods. Both methods are based on the Taylor series expansion. Since the function for the 1st derivative is known, this means that we have an equation for the slope to the curve y(x) makes on the (x,y) plane.
The basic definition of the first derivative is given by 

![y(x+h)=h[\frac{dy}{dx}]+y(x)](https://s0.wp.com/latex.php?latex=y%28x%2Bh%29%3Dh%5B%5Cfrac%7Bdy%7D%7Bdx%7D%5D%2By%28x%29&bg=ffffff&fg=111111&s=0&c=20201002)
The Runge-Kutta method is a little bit more complex, but it is more accurate as well. This approach is building on the fact that ![y(x+h)=y(x)+h[\frac{1}{6}(k1+2\times k2+2\times k3+k4)]](https://s0.wp.com/latex.php?latex=y%28x%2Bh%29%3Dy%28x%29%2Bh%5B%5Cfrac%7B1%7D%7B6%7D%28k1%2B2%5Ctimes+k2%2B2%5Ctimes+k3%2Bk4%29%5D&bg=ffffff&fg=111111&s=0&c=20201002)




It comes as no surprise that the Runge-Kutta is more accurate than the Euler’s method since it is better at approximating the curve of y(x).
We will now look at the implementation of these two methods in C#. My code is given below. Note that I am following my usual coding style by making the individual solution classes to derive from an abstract InitialValue class. Most of the variables and functionality that is common to both method is contained within the parent class. The differential function is implemented as a delegate. Finally, I am also populating the metadata for the class constructors and the solution methods this time, as this is a good practice.
using System;
using System.Collections.Generic;
namespace DifferentialEquations
{
abstract class InitialValue
{
internal delegate double DerivativeFunction(double x, double y);
internal InitialValue(DerivativeFunction func, double initValX, double initValY, double solPoint)
{
givenFunction = func;
this.initValX = initValX;
this.initValY = initValY;
this.solPoint = solPoint;
CalcDistance();
}
internal double Delta
{
get
{
return delta;
}
}
internal int Distance
{
get
{
return distance;
}
}
//calculates absolute distance between the x point for required solution and the initial value of x
private void CalcDistance()
{
double res = 0.0;
if (this.initValX < 0 && this.solPoint < 0)
{
res = Math.Abs(Math.Min(this.initValX, this.solPoint) - Math.Max(this.initValX, this.solPoint));
}
else if (this.initValX > 0 && this.solPoint > 0)
{
res = Math.Max(this.initValX, this.solPoint) - Math.Min(this.initValX, this.solPoint);
}
else
{
res = Math.Abs(this.solPoint) + Math.Abs(this.initValX);
}
this.distance = (int)res;
}
internal abstract double[] SolveDifferentialEquation();
protected DerivativeFunction givenFunction;
private const double delta=0.01;
protected double initValX;
protected double initValY;
protected double solPoint;
private int distance=0;
}
sealed class EulerMethod:InitialValue
{
/// <summary>
/// Initialises the Euler method
/// </summary>
/// <param name="func">differential function to approximate</param>
/// <param name="initValX">initial value for x</param>
/// <param name="initValY">initial value for y</param>
/// <param name="solPoint">solution point: value of x for which y=f(x) is required</param>
internal EulerMethod(DerivativeFunction func, double initValX, double initValY, double solPoint):base(func,initValX, initValY, solPoint)
{
altDelta = base.Delta;
}
/// <summary>
/// Initialises the Euler method
/// </summary>
/// <param name="func">differential function to approximate</param>
/// <param name="initValX">initial value for x</param>
/// <param name="initValY">initial value for y</param>
/// <param name="solPoint">solution point: value of x for which y=f(x) is required</param>
/// <param name="delta">alternative value for delta</param>
internal EulerMethod(DerivativeFunction func, double initValX, double initValY, double solPoint, double delta)
: base(func, initValX, initValY, solPoint)
{
//this check will not provide for all cases but good enough for demonstration
if (delta < base.Distance)
altDelta = delta;
else
{
Console.WriteLine("Delta value too large. Using default delta of 0.01.");
altDelta = base.Delta;
}
}
/// <summary>
/// Solves a differential equation using the Euler method
/// </summary>
/// <returns>y=f(x) solution at the required point of x</returns>
internal override double[] SolveDifferentialEquation()
{
direction = (this.initValX < base.solPoint) ? true : false;
//the position at index 0 will be taken by initial value
int numPoints = (int)(base.Distance/ this.altDelta)+1;
double[] solutionPoints = new double[numPoints];
double x = this.initValX;
solutionPoints[0] = this.initValY;
for (int i = 0; i < numPoints-1; i++)
{
solutionPoints[i + 1] = solutionPoints[i] + altDelta * this.givenFunction(x, solutionPoints[i]);
if (direction)
x = x + altDelta;
else
x = x - altDelta;
}
Console.WriteLine("Euler Solution at x=: " + base.solPoint + " is " + solutionPoints.GetValue(numPoints - 1));
return solutionPoints;
}
private bool direction;
private double altDelta;
}
sealed class RungeKuttaMethod : InitialValue
{
/// <summary>
/// Initialises the Runge-Kutta method
/// </summary>
/// <param name="func">differential function to approximate</param>
/// <param name="initValX">initial value for x</param>
/// <param name="initValY">initial value for y</param>
/// <param name="solPoint">solution point: value of x for which y=f(x) is required</param>
internal RungeKuttaMethod(DerivativeFunction func, double initValX, double initValY, double solPoint)
: base(func, initValX, initValY, solPoint)
{
altDelta = base.Delta;
}
/// <summary>
/// Initialises the Runge-Kutta method
/// </summary>
/// <param name="func">differential function to approximate</param>
/// <param name="initValX">initial value for x</param>
/// <param name="initValY">initial value for y</param>
/// <param name="solPoint">solution point: value of x for which y=f(x) is required</param>
/// <param name="delta">alternative delta value</param>
internal RungeKuttaMethod(DerivativeFunction func, double initValX, double initValY, double solPoint, double delta)
: base(func, initValX, initValY, solPoint)
{
//this check will not provide for all cases but good enough for demonstration
if (delta < base.Distance)
altDelta = delta;
else
{
Console.WriteLine("Delta value too large. Using default delta of 0.01.");
altDelta = base.Delta;
}
}
/// <summary>
/// Solves a differential equation using Runge-Kutta method
/// </summary>
/// <returns>y=f(x) solution at the required point of x</returns>
internal override double[] SolveDifferentialEquation()
{
direction = (this.initValX < base.solPoint) ? true : false;
//the position at index 0 will be taken by initial value
int numPoints = (int)(base.Distance/ this.altDelta)+1;
double[] solutionPoints = new double[numPoints];
double x = this.initValX;
double k1, k2, k3, k4 = this.initValY;
double scale = 1.0/6.0;
double increment = altDelta/2;
solutionPoints[0] = this.initValY;
for (int i = 0; i < numPoints - 1; i++)
{
k1 = this.givenFunction(x, solutionPoints[i]);
k2 = this.givenFunction(x + increment, solutionPoints[i] + increment * k1);
k3 = this.givenFunction(x + increment, solutionPoints[i] + increment * k2);
k4 = this.givenFunction(x + altDelta, solutionPoints[i] + altDelta * k3);
solutionPoints[i + 1] = solutionPoints[i] + altDelta*scale *(k1+2.0*k2+2.0*k3+k4);
if (direction)
x = x + altDelta;
else
x = x - altDelta;
}
Console.WriteLine("Runge-Kutta Solution at x=: "+base.solPoint+" is " + solutionPoints.GetValue(numPoints - 1));
return solutionPoints;
}
private bool direction;
private double altDelta;
}
class EntryPoint
{
static void Main(string[] args)
{
EulerMethod eu = new EulerMethod(DerivFunction, 0, 0,5);
double[]resEU = eu.SolveDifferentialEquation();
RungeKuttaMethod rk = new RungeKuttaMethod(DerivFunction, 0, 0,5);
double[] resRK = rk.SolveDifferentialEquation();
Console.ReadLine();
}
static double DerivFunction(double x, double y)
{
//double pow = (1.0 / 3.0);
//return x * Math.Pow(y, pow);
//return 14.0 * x - 3.0;
return Math.Cos(x) - 3.0;
}
}
}
Below are the results for three initial value problems. Here the h increment is 0.01. The Runge-Kutta method provides a very good approximation.
| Differential Equation | Euler’s | Runge-Kutta | Exact Solution (at x=5) |
|---|---|---|---|
 |
26.8956 | 26.9999 | 27 |
 |
159.6499 | 159.9999 | 160 |
|
-15.9553 | -15.9589 | -15.9589 |
 equal to zero. There are many approaches to findings the roots of equation in nonlinear algebra. Some of the well-known ones include: the linear interpolation (or bisection) method, Newton’s method, Bernoulli’s method and its variations. In this post I am demonstrating an implementation of the two basic methods: bisection and Newton’s. We will also compare their performances.
equal to zero. There are many approaches to findings the roots of equation in nonlinear algebra. Some of the well-known ones include: the linear interpolation (or bisection) method, Newton’s method, Bernoulli’s method and its variations. In this post I am demonstrating an implementation of the two basic methods: bisection and Newton’s. We will also compare their performances. , where
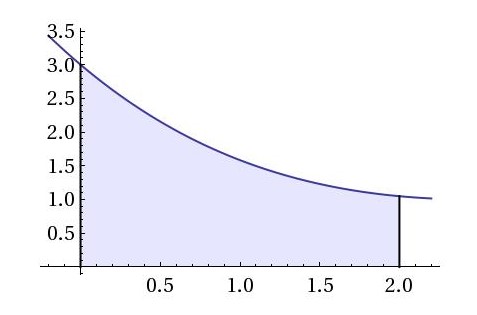
, where  is the current approximation. This process terminates when either of the following conditions is reached: (a) we find the solution to some acceptable accuracy, or (b) we do not find the solution and terminate because the current distance on which we iterate is less than some error value (i.e. we have exhausted the interval without convergence), or we have exceeded the number of allowed iterations. The solution may not be obtained if the starting points are chosen poorly, and there are no roots on the [a,b] interval. For example, take a look at Figure 1, which is a plot of
is the current approximation. This process terminates when either of the following conditions is reached: (a) we find the solution to some acceptable accuracy, or (b) we do not find the solution and terminate because the current distance on which we iterate is less than some error value (i.e. we have exhausted the interval without convergence), or we have exceeded the number of allowed iterations. The solution may not be obtained if the starting points are chosen poorly, and there are no roots on the [a,b] interval. For example, take a look at Figure 1, which is a plot of  , where some possible [a,b] interval is marked. Imagine instead we pick [a,b] to be [2,3]. Since nowhere on [2,3] is
, where some possible [a,b] interval is marked. Imagine instead we pick [a,b] to be [2,3]. Since nowhere on [2,3] is  , this interval does not provide any roots.
, this interval does not provide any roots.
 , we can improve upon the guess by updating it with the value of x for which
, we can improve upon the guess by updating it with the value of x for which 
 is the tangent line function.
is the tangent line function. . This is why I think it is a bit more complex. Also, there are several conditions, under which this method fails to find a solution. One of them is that
. This is why I think it is a bit more complex. Also, there are several conditions, under which this method fails to find a solution. One of them is that  is undefined. Another is that
is undefined. Another is that  . More conditions can be found on Wikipedia.
. More conditions can be found on Wikipedia. . In my implementation, the bisection method finds the negative root, while the Newton’s method finds the positive root, since the initial guess is closer to the positive root. It takes 13 iterations to approximate the solution with the bisection method. While it takes only 4 iterations with the Newton’s method.
. In my implementation, the bisection method finds the negative root, while the Newton’s method finds the positive root, since the initial guess is closer to the positive root. It takes 13 iterations to approximate the solution with the bisection method. While it takes only 4 iterations with the Newton’s method.






](https://s0.wp.com/latex.php?latex=%5Cint_a%5Eb+%5C%21+f%28x%29+%5C%2C+%5Cmathrm%7Bd%7Dx+%5Capprox+%5Cfrac%7B1%7D%7B2%7D%5Bf%28a%29%2Bf%28b%29%5D%28b-a%29&bg=ffffff&fg=111111&s=0&c=20201002)
![\int_a^b \! f(x) \, \mathrm{d}x \approx \frac{1}{3}[f(a)+f(\frac{a+b}{2})+f(b)]](https://s0.wp.com/latex.php?latex=%5Cint_a%5Eb+%5C%21+f%28x%29+%5C%2C+%5Cmathrm%7Bd%7Dx+%5Capprox+%5Cfrac%7B1%7D%7B3%7D%5Bf%28a%29%2Bf%28%5Cfrac%7Ba%2Bb%7D%7B2%7D%29%2Bf%28b%29%5D&bg=ffffff&fg=111111&s=0&c=20201002)



